In last episode, we finished up minimax strategy for Connect-N games,
including Tic-Tac-Toe and Gomoku. This episode, we will implement its
GUI environment based on Pygame library for human vs. human, AI vs. AI
or human vs. AI plays, which is essential for self-play AlphaGo Zero
reinforcement learning. The environment is further embedded into OpenAI
Gym as it's the standard in game reinforcement learning. All code in
this series is in ConnectNGym
github.
Python has several well-known multi-platform GUI libraries such as
Tkinter, PyQt. They are mainly targeted at desktop GUI programming,
whose API family is complicated and learning curve is steep. In
contrast, Pygame is tailored specifically for desktop small game
development so we adopt it. ### Pygame 101
Pygame is, no exceptionally, the same as all GUI development, that is
based on single thread event driven model. Here is the simplest desktop
Pygame application showing a window. while True infinitely retrieves
events dispatched by OS to the window. In the example, we only handle
quit event (user clicking on close button) to exit the whole process. In
addition, clock variable controls FPS, which we won't elaborate on.
whileTrue: for event in pygame.event.get(): if event.type == pygame.QUIT: sys.exit(0) else: pygame.display.update() clock.tick(1)
PyGameBoard Class
PyGameBoard class encapsulates GUI interaction and rendering logics.
In last episode, we have coded ConnectNGame class. PyGameBoard is
instantiated with a pre-initialized ConnectNGame instance. It handles
GUI mouse event to determine next valid move and then further
manipulates its internal state, which is just the ConnectNGame instance
passed in. Concretely, PyGameBoard instance method,
next_user_input(self) loops until a valid action is identified by
current player.
Following Pygame 101, method check_event() handles events dispatched
by OS and only player mouse event is consumed. Method
_handle_user_input() converts mouse event into row and column indices,
validates the move and returns the move in the form of Tuple[int, int].
For instance, (0, 0) is the upper left corner position.
defcheck_event(self): for e in pygame.event.get(): if e.type == pygame.QUIT: pygame.quit() sys.exit(0) elif e.type == pygame.MOUSEBUTTONDOWN: self._handle_user_input(e) def_handle_user_input(self, e: Event) -> Tuple[int, int]: origin_x = self.start_x - self.edge_size origin_y = self.start_y - self.edge_size size = (self.board_size - 1) * self.grid_size + self.edge_size * 2 pos = e.pos if origin_x <= pos[0] <= origin_x + size and origin_y <= pos[1] <= origin_y + size: ifnot self.connectNGame.gameOver: x = pos[0] - origin_x y = pos[1] - origin_y r = int(y // self.grid_size) c = int(x // self.grid_size) valid = self.connectNGame.checkAction(r, c) if valid: self.action = (r, c) return self.action
Integrated into OpenAI Gym
OpenAI Gym specifies how Agent interacts with Env. Env is defined as
gym.Env and the major task of creating a new game Environment is
subclassing it and overriding reset, step and render methods. Let's see
how our ConnectNGym looks like.
defreset(self) -> ConnectNGame: """Resets the state of the environment and returns an initial observation. Returns: observation (object): the initial observation. """ raise NotImplementedError
defstep(self, action: Tuple[int, int]) -> Tuple[ConnectNGame, int, bool, None]: """Run one timestep of the environment's dynamics. When end of episode is reached, you are responsible for calling `reset()` to reset this environment's state. Accepts an action and returns a tuple (observation, reward, done, info). Args: action (object): an action provided by the agent Returns: observation (object): agent's observation of the current environment reward (float) : amount of reward returned after previous action done (bool): whether the episode has ended, in which case further step() calls will return undefined results info (dict): contains auxiliary diagnostic information (helpful for debugging, and sometimes learning) """ raise NotImplementedError
defrender(self, mode='human'): """ Renders the environment. The set of supported modes varies per environment. (And some environments do not support rendering at all.) By convention, if mode is: - human: render to the current display or terminal and return nothing. Usually for human consumption. - rgb_array: Return an numpy.ndarray with shape (x, y, 3), representing RGB values for an x-by-y pixel image, suitable for turning into a video. - ansi: Return a string (str) or StringIO.StringIO containing a terminal-style text representation. The text can include newlines and ANSI escape sequences (e.g. for colors). Note: Make sure that your class's metadata 'render.modes' key includes the list of supported modes. It's recommended to call super() in implementations to use the functionality of this method. Args: mode (str): the mode to render with """ raise NotImplementedError
Method reset()
1
defreset(self) -> ConnectNGame
Resets environment internal state and returns corresponding initial
status that can be observed by agent. ConnectNGym holds an instance of
ConnectNGame as its internal state and because of the complete
observability property in any board games, the observable state by agent
is exactly the same as board game internal state. So we return a
deepcopy of ConnectNGame instance in reset().
Once the agent selects an action and hands back to env, env would
execute the action and change its internal state via step() and returns
following four items.
The new state observed by the agent
The reward associated with the action
Environment terminated or not
Other auxiliary information
step() is the most core API of gym.Env. We illustrate a sequence of
game state transitions together with input and output
State ((1, 0, 0), (0, -1, 0), (0, 0, 0))
Repeat the process and game may end up with following terminal state
after 5 rounds.
Terminal State ((1, 1, 1), (-1, -1, 0), (0, 0, 0))
The following animation shows two minimax AI players playing
Tic-Tac-Toe game (k=3,m=n=3). We know the conclusion from previous
episode that Tic-Tac-Toe is solved to be a draw, meaning when two
players both play optimal strategy, the first player is forced tie by
second one, which corresponds to animation result.
Minimax AI Self-Play
Game State Rotation
Enhancement
In last episode, we have confirmed Tic-Tac-Toe has 5478 total states.
The number grows exponentially as k, m and n increase. For instance, in
case where k=3, m=n=4 the total state number is 6035992 whereas k=4,
m=n=4 it's 9722011. We could improve Minimax DP strategy by pruning
those game states that are rotated from one solved game state. That is,
once a game state is solved, we not only cache this game state but also
cache other three game states derived by rotation that share the same
result.
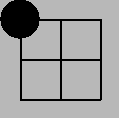
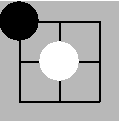
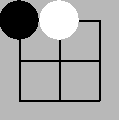
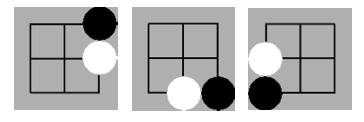
For example, game state below has same result as other three rotated
ones.
Game State 1
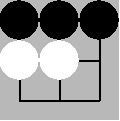
Other Rotated 3 States
{linenos
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
defsimilarStatus(self, status: Tuple[Tuple[int, ...]]) -> List[Tuple[Tuple[int, ...]]]: ret = [] rotatedS = status for _ inrange(4): rotatedS = self.rotate(rotatedS) ret.append(rotatedS) return ret
defrotate(self, status: Tuple[Tuple[int, ...]]) -> Tuple[Tuple[int, ...]]: N = len(status) board = [[ConnectNGame.AVAILABLE] * N for _ inrange(N)]
for r inrange(N): for c inrange(N): board[c][N - 1 - r] = status[r][c]
returntuple([tuple(board[i]) for i inrange(N)])
Minimax Strategy
Precomputation
In last version of Minimax DP strategy implementation, we searched
best game result given a game state. In the computation, we also
leveraged pruning to shortcut if the result is already best. However,
for AI agent, we still have to call minimax for each new game state
encountered. This is very inefficient because we are solving same game
states again and again during top down recursion. An obvious improvement
is to compute all game states in first step and cache them all. Later
for each given state encountered, we only need to aggregate result by
looking at all possible next move positions of that game state. Code of
aggregating possible moves is listed below.
defaction(self, game: ConnectNGame) -> Tuple[int, Tuple[int, int]]: game = copy.deepcopy(game)
player = game.currentPlayer bestResult = player * -1# assume opponent win as worst result bestMove = None for move in game.getAvailablePositions(): game.move(*move) status = game.getStatus() game.undo()
result = self.dpMap[status]
if player == ConnectNGame.PLAYER_A: bestResult = max(bestResult, result) else: bestResult = min(bestResult, result) # update bestMove if any improvement bestMove = move if bestResult == result else bestMove print(f'move {move} => {result}')
return bestResult, bestMove
Agent Class and Playing
Logic
We also construct Agent class hierarchy, allowing AI player and human
player to share common code.
BaseAgent is the root class with default act() method being making
random decisions over all available actions.