经典教材Reinforcement Learning: An Introduction 第二版由强化领域权威Richard S. Sutton 和 Andrew G. Barto 完成编写,内容深入浅出,非常适合初学者。在本篇中,引入Grid World示例,结合强化学习核心概念,并用python代码实现OpenAI Gym的模拟环境,进一步实现策略评价算法。
Grid World 问题
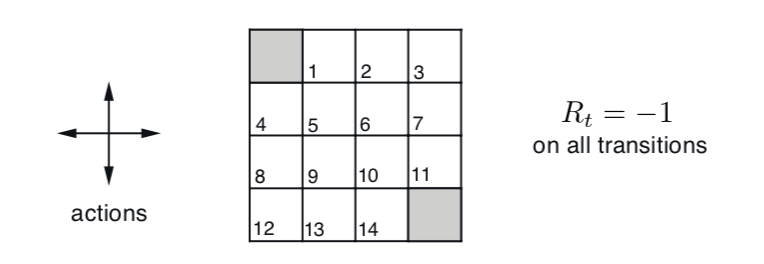
第四章例子4.1提出了一个简单的离散空间状态问题:Grid World,其大致意思是在4x4的网格世界中有14个格子是非终点状态,在这些非终点状态的格子中可以往上下左右四个方向走,直至走到两个终点状态格子,则游戏结束。每走一步,Agent收获reward -1,表示Agent希望在Grid World中尽早出去。另外,Agent在Grid World边缘时,无法继续往外只能呆在原地,reward也是-1。
Finite MDP 模型
先来回顾一下强化学习的建模基础:有限马尔可夫决策过程(Finite Markov Decision Process, Finite MDP)。如下图,强化学习模型将世界抽象成两个实体,强化学习解决目标的主体Agent和其他外部环境。它们之间的交互过程遵从有限马尔可夫决策过程:若Agent在t时间步骤时处于状态 \(S_t\),采取动作 \(A_t\),然后环境根据自身机制,产生Reward \(R_{t+1}\) 并将Agent状态变为 \(S_{t+1}\)。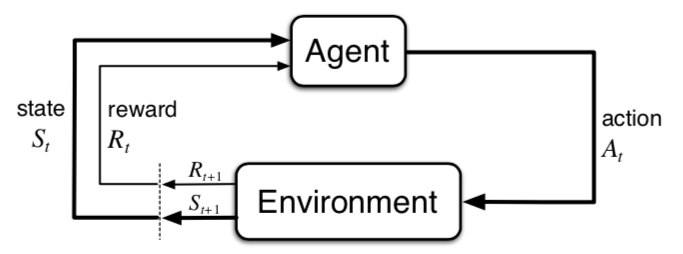
环境自身机制又称为dynamics,工程上可以看成一个输入(S, A),输出(S, R)的方法。由于MDP包含随机过程,某个输入并不能确定唯一输出,而会根据概率分布输出不同的(S, R)。Finite MDP简化了时间对于模型的影响,因为(S, R)只和(S, A)有关,不和时间t有关。另外,有限指的是S,A,R的状态数量是有限的。
数学上dynamics可以如下表示
\[ p\left(s^{\prime}, r \mid s, a\right) \doteq \operatorname{Pr}\left\{S_{t}=s^{\prime}, R_{t}=r \mid S_{t-1}=s, A_{t-1}=a\right\} \]
即是四元组作为输入的概率函数 \(p: S \times R \times S \times A \rightarrow [0, 1]\)。
满足 \[ \sum_{s^{\prime} \in \mathcal{S}} \sum_{r \in \mathcal{R}} p\left(s^{\prime}, r \mid s, a\right)=1, \text { for all } s \in \mathcal{S}, a \in \mathcal{A}(s) \]
以Grid World为例,当Agent处于编号1的网格时,可以往四个方向走,往任意方向走都只产生一种 S, R,因为这个简单的游戏是确定性的,不存在某一动作导致stochastic状态。例如,在1号网格往左就到了终点网格(编号0),得到Reward -1这个规则可以如下表示 \[ p\left(s^{\prime}=0, r=-1 \mid s=1, a=\text{L}\right) = 1 \] 因此,状态s=1的所有dynamics概率映射为\[ \begin{aligned} p\left(s^{\prime}=0, r=-1 \mid s=1, a=\text{L}\right) &=& 1 \\ p\left(s^{\prime}=2, r=-1 \mid s=1, a=\text{R}\right) &=& 1 \\ p\left(s^{\prime}=1, r=-1 \mid s=1, a=\text{U}\right) &=& 1 \\ p\left(s^{\prime}=5, r=-1 \mid s=1, a=\text{D}\right) &=& 1 \end{aligned} \]
强化学习的目的
在给定了问题以及定义了强化学习的模型之后,强化学习的目的当然是通过学习让Agent能够学到最佳策略\(\pi_{*}\),也就是在某个状态下的行动分布,记成 \(\pi(a|s)\)。对应在数值上的优化目标是Agent在一系列过程中采取某种策略的reward总和的期望(Expected Return)。下面公式定义了t步往后的reward总和,其中 \(\gamma\) 为discount factor,用于权衡短期和长期reward对于当前Agent的效用影响。等式最后一步的意义是t步后的reward总和等价于t步所获的立即reward \(R_{t+1}\),加上t+1步后的reward总和 \(\gamma G_{t+1}\)。
\[ \begin{aligned} G_{t} & \doteq R_{t+1}+\gamma R_{t+2}+\gamma^{2} R_{t+3}+\gamma^{3} R_{t+4}+\cdots \\ &=R_{t+1}+\gamma\left(R_{t+2}+\gamma R_{t+3}+\gamma^{2} R_{t+4}+\cdots\right) \\ &=R_{t+1}+\gamma G_{t+1} \end{aligned} \]
有了reward总和的定义,评价Agent策略 \(\pi\) 就可以定义成Agent在状态 s 时采用此策略的Expected Return。
\[ v_{\pi}(s) \doteq \mathbb{E}_{\pi}\left[G_{t} \mid S_{t}=s\right] \]
下面公式推导了 \(v_{\pi}(s)\) 数值上和相关状态 \(s{\prime}\) 的关系:
\[ \begin{aligned} v_{\pi}(s) &\doteq \mathbb{E}_{\pi}\left[G_{t} \mid S_{t}=s\right] \\ &=\mathbb{E}_{\pi}\left[\sum_{k=0}^{\infty} \gamma^{k} R_{t+k+1} \mid S_{t}=s\right]\\ &=\mathbb{E}_{\pi}\left[R_{t+1}+\gamma G_{t+1} \mid S_{t}=s\right] \\ &=\sum_{a} \pi(a \mid s) \sum_{s^{\prime}} \sum_{r} p\left(s^{\prime}, r \mid s, a\right)\left[r+\gamma \mathbb{E}_{\pi}\left[G_{t+1} \mid S_{t+1}=s^{\prime}\right]\right] \\ &=\sum_{a} \pi(a \mid s) \sum_{s^{\prime}, r} p\left(s^{\prime}, r \mid s, a\right)\left[r+\gamma v_{\pi}\left(s^{\prime}\right)\right] \quad \text { for all } s \in \mathcal{S} \end{aligned} \]
注意到如果将 \(v_{\pi}(s)\) 看成未知数,上式即形成 \(\mid \mathcal{S} \mid\) 个未知变量的方程组,可以在数值上解得各个 \(v_{\pi}(s)\)。
书中用Backup Diagram来表示递推关系,下图是\(v_{\pi}(s)\)的backup diagram。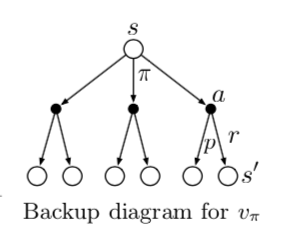
尽管v值可以来衡量策略,但由于\(v_{\pi}(s)\) 是Agent在策略\(\pi(a|s)\)的Expected Return,将不同的action拆出来单独计算Expected Return,这样的做法有时更为直接,这就是著名的Q Learning中的q 值,记成\(q_{\pi}(s, a)\) 。
\[ q_{\pi}(s, a) \doteq \mathbb{E}_{\pi}\left[G_{t} \mid S_{t}=s, A_{t}=a\right] \]
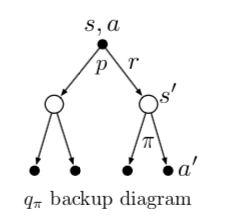
下面是 $q_{}(s, a) $ 的递推 backup diagram。
Bellman 最佳原则
对于所有状态集合\(\mathcal{S}\),策略\({\pi}\)的评价指标 \(v_{\pi}(s)\) 是一个向量,本质上是无法相互比较的。但由于存在Bellman 最佳原则(Bellman's principle of optimality):在有限状态情况下,一定存在一个或者多个最好的策略 \({\pi}_{*}\),它在所有状态下的v值都是最好的,即 \(v_{\pi_{*}}(s) \ge v_{\pi^{\prime}}(s) \text { for all } s \in \mathcal{S}\)。
因此,最佳v值定义为最佳策略 \({\pi}_{*}\) 对应的 v 值
\[ v_{*}(s) \doteq \max_{\pi} v_{\pi}(s) \]
同理,也存在最佳q值,记为 \[ \begin{aligned} q_{*}(s, a) &\doteq \max_{\pi} q_{\pi}(s,a) \end{aligned} \]
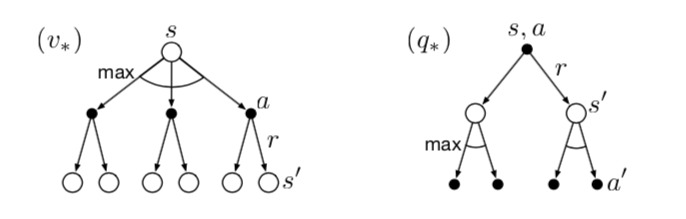
将 \(v_{*}(s)\) 改写成递推形式,称为 Bellman Optimality Equation,推导如下
\[ \begin{aligned} v_{*}(s) &=\max _{a \in \mathcal{A}(s)} q_{\pi_{*}}(s, a) \\ &=\max _{a} \mathbb{E}_{\pi_{*}}\left[G_{t} \mid S_{t}=s, A_{t}=a\right] \\ &=\max _{a} \mathbb{E}_{\pi_{*}}\left[R_{t+1}+\gamma G_{t+1} \mid S_{t}=s, A_{t}=a\right] \\ &=\max _{a} \mathbb{E}\left[R_{t+1}+\gamma v_{*}\left(S_{t+1}\right) \mid S_{t}=s, A_{t}=a\right] \\ &=\max _{a} \sum_{s^{\prime}, r} p\left(s^{\prime}, r \mid s, a\right)\left[r+\gamma v_{*}\left(s^{\prime}\right)\right] \end{aligned} \]
直觉上可以理解为状态 s 对应的最佳v值是只采取此状态下的最佳动作后的Expected Return。
最佳q值递归形式的意义为最佳策略下状态s时采取行动 a 的Expected Return,等于所有可能后续状态 s' 下采取最优行动的Expected Return的均值。推导如下:
\[ \begin{aligned} q_{*}(s, a) &=\mathbb{E}\left[R_{t+1}+\gamma \max _{a^{\prime}} q_{*}\left(S_{t+1}, a^{\prime}\right) \mid S_{t}=s, A_{t}=a\right] \\ &=\sum_{s^{\prime}, r} p\left(s^{\prime}, r \mid s, a\right)\left[r+\gamma \max _{a^{\prime}} q_{*}\left(s^{\prime}, a^{\prime}\right)\right] \end{aligned} \]
Grid World 最佳策略和V值
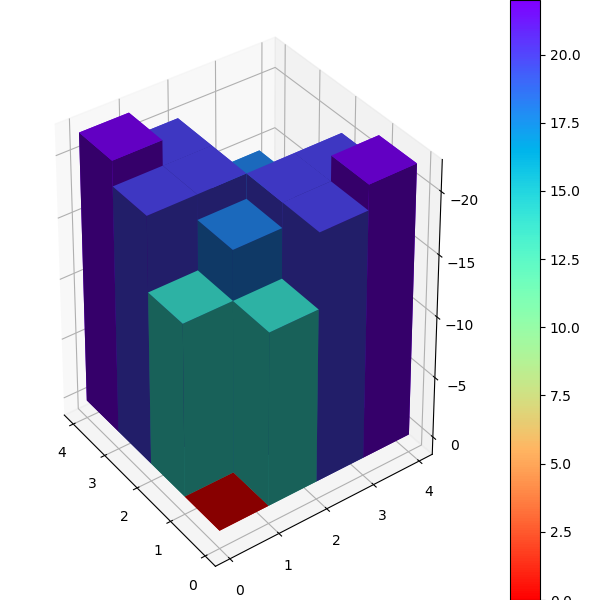
Grid World 的最佳策略如下:尽可能快的走出去
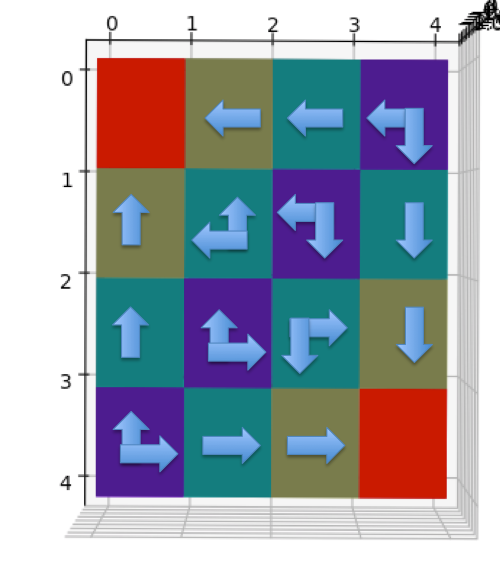
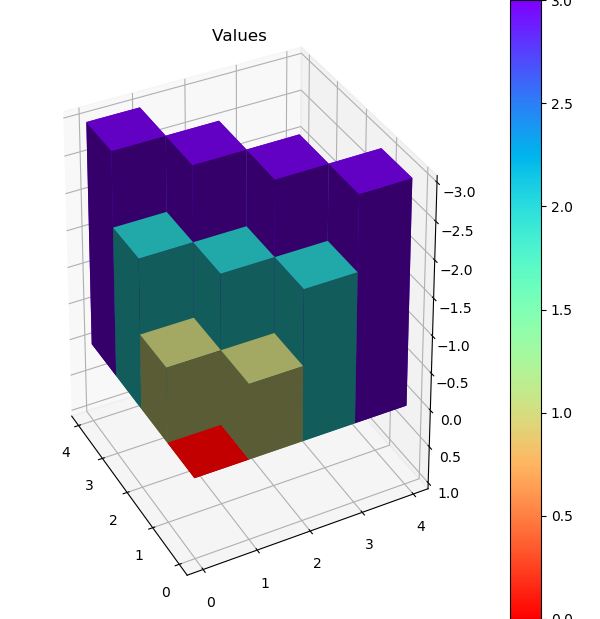
上面的2D图中不同颜色表示不同V值,终点格子的红色表示0,隔着一步的黄色为-1,隔两步的绿色为-2,最远的紫色为-3。下面是立体图示。
Grid World OpenAI Gym 环境
下面是OpenAI Gym框架下Grid World环境的代码实现。本质是在GridWorldEnv构造函数中构建MDP,类型定义如下
1 | MDP = Dict[State, Dict[Action, List[Tuple[Prob, State, Reward, bool]]]] |
1 | class Action(Enum): |
策略评估(Policy Evaluation)
策略评估需要解决在给定环境dynamics和Agent策略 \(\pi\)下,计算策略的v值 \(v_{\pi}\)。由于所有数量关系都已知,可以通过解方程组的方式求得,但通常会通过数值迭代的方式来计算,即通过一系列 \(v_{0}, v_{1}, ..., v_{k}\) 收敛至 \(v_{\pi}\)。如下迭代方式已经得到证明,当 \(k \rightarrow \infty\) 一定收敛至 \(v_{\pi}\)。
\[ \begin{aligned} v_{k+1}(s) & \doteq \mathbb{E}_{\pi}\left[R_{t+1}+\gamma v_{k}\left(S_{t+1}\right) \mid S_{t}=s\right] \\ &=\sum_{a} \pi(a \mid s) \sum_{s^{\prime}, r} p\left(s^{\prime}, r \mid s, a\right)\left[r+\gamma v_{k}\left(s^{\prime}\right)\right] \end{aligned} \]
书中具体伪代码如下
\[ \begin{align*} &\textbf{Iterative Policy Evaluation, for estimating } V\approx v_{\pi} \\ & \text{Input } {\pi}, \text{the policy to be evaluated} \\ & \text{Algorithm parameter: a small threshold } \theta > 0 \text{ determining accuracy of estimation} \\ & \text{Initialize } V(s), \text{for all } s \in \mathcal{S}^{+} \text{, arbitrarily except that } V (terminal) = 0\\ & \\ &1: \text{Loop:}\\ &2: \quad \quad \Delta \leftarrow 0\\ &3: \quad \quad \text{Loop for each } s \in \mathcal{S}:\\ &4: \quad \quad \quad \quad v \leftarrow V(s) \\ &5: \quad \quad \quad \quad V(s) \leftarrow \sum_{a} \pi(a \mid s) \sum_{s^{\prime}, r} p\left(s^{\prime}, r \mid s, a\right)\left[r+\gamma V\left(s^{\prime}\right)\right] \\ &6: \quad \quad \quad \quad \Delta \leftarrow \max(\Delta, |v-V(s)|) \\ &7: \text{until } \Delta < \theta \end{align*} \]
下面是python 代码实现,注意这里单run迭代时,新的v值直接覆盖数组里的旧v值,这种做法在书中被证明不仅有效,甚至更为高效。这种做法称为原地(in place)更新。
1 | def policy_evaluate(policy: Policy, env: GridWorldEnv, gamma=1.0, theta=0.0001): |
输入策略为随机选择方向,运行上面的policy_evaluate最终多轮收敛后的V值输出为
1 | [[ 0. -13.99931242 -19.99901152 -21.99891199] |

评论
shortnamefor Disqus. Please set it in_config.yml.