本篇是TSP问题从DP算法到深度学习系列第二篇。
AIZU TSP 自底向上迭代DP解
上一篇中,我们用Python 3和Java
8完成了自顶向下递归版本的DP解。我们继续改进代码,将它转换成标准DP方式:自底向上的迭代DP版本。下图是3个点TSP问题的递归调用图。
将这个图反过来检查状态的依赖关系,可以很容易发现规律:首先计算状态位含有一个1的点,接着是两个1的节点,最后是状态位三个1的点。简而言之,在计算状态位为n+1个1的节点时需要用到n个1的节点的计算结果,如果能依照这样的
topological 顺序来的话,就可以去除递归,写成迭代(循环)版本的DP。
迭代算法的Java 伪代码如下
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 for (int bitset_num = N; bitset_num >=0 ; bitset_num++) { while (hasNextCombination(bitset_num)) { int state = nextCombination(bitset_num); for (int v = 0 ; v < n; v++) { for (int u = 0 ; u < n; u++) { if (!include(state, u)) { dp[state][v] = min(dp[state][v], dp[new_state_include_u][u] + dist[v][u]); } } } } }
举例来说,dp[00010][1] 是从顶点0出发,刚经过顶点1的最小距离 \(0 \rightarrow 1 \rightarrow ? \rightarrow ?
\rightarrow ? \rightarrow 0\) 。
为了找到最小距离值,就必须遍历所有可能的下一个可能的顶点u
(第一个问号位置)。 \[
(0 \rightarrow 1) +
\begin{align*}
\min \left\lbrace
\begin{array}{r@{}l}
2 \rightarrow ? \rightarrow ? \rightarrow 0 + dist(1,2)
\qquad\text{ new_state=[00110][2] } \qquad\\\\
3 \rightarrow ? \rightarrow ? \rightarrow 0 + dist(1,3)
\qquad\text{ new_state=[01010][3] } \qquad\\\\
4 \rightarrow ? \rightarrow ? \rightarrow 0 + dist(1,4)
\qquad\text{ new_state=[10010][4] } \qquad
\end{array}
\right.
\end{align*}
\]
迭代DP AC代码
以下是AC 的Java 算法核心代码。完整代码在 github/MyEncyclopedia 的tsp/alg_aizu/Main_loop.java 。
{linenos 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 public long solve () int N = g.V_NUM; long [][] dp = new long [1 << N][N]; for (int i = 0 ; i < dp.length; i++) { Arrays.fill(dp[i], Integer.MAX_VALUE); } dp[(1 << N) - 1 ][0 ] = 0 ; for (int state = (1 << N) - 2 ; state >= 0 ; state--) { for (int v = 0 ; v < N; v++) { for (int u = 0 ; u < N; u++) { if (((state >> u) & 1 ) == 0 ) { dp[state][v] = Math.min(dp[state][v], dp[state | 1 << u][u] + g.edges[v][u]); } } } } return dp[0 ][0 ] == Integer.MAX_VALUE ? -1 : dp[0 ][0 ]; }
很显然,时间算法复杂度对应了三重 for 循环,为 O(\(2^n * n * n\) ) = O(\(2^n*n^2\) )。
类似的,Python 3 AC 代码如下。完整代码在 github/MyEncyclopedia 的tsp/alg_aizu/TSP_loop.py 。
{linenos 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 class TSPSolver : g: Graph def __init__ (self, g: Graph ): self.g = g def solve (self ) -> int : """ :param v: :param state: :return: -1 means INF """ N = self.g.v_num dp = [[INT_INF for c in range (N)] for r in range (1 << N)] dp[(1 << N) - 1 ][0 ] = 0 for state in range ((1 << N) - 2 , -1 , -1 ): for v in range (N): for u in range (N): if ((state >> u) & 1 ) == 0 : if dp[state | 1 << u][u] != INT_INF and self.g.edges[v][u] != INT_INF: if dp[state][v] == INT_INF: dp[state][v] = dp[state | 1 << u][u] + self.g.edges[v][u] else : dp[state][v] = min (dp[state][v], dp[state | 1 << u][u] + self.g.edges[v][u]) return dp[0 ][0 ]
一个欧式空间TSP数据集
至此,TSP的DP解法全部讲解完毕。接下去,我们引入一个二维欧式空间的TSP数据集
PTR_NET
on Google Drive ,这个数据集是 Pointer Networks 的作者
Oriol Vinyals 用于模型的训练测试而引入的。
数据集的每一行格式如下:
1 x1, y1, x2, y2, ... output 1 v1 v2 v3 ... 1
一行开始为n个点的x, y坐标,接着是
output,再接着是1,表示从顶点1出发,经v1,v2,...,返回1,注意顶点编号从1开始。
十个顶点数据集的一些数据示例如下:
1 2 3 4 0.607122 0.664447 0.953593 0.021519 0.757626 0.921024 0.586376 0.433565 0.786837 0.052959 0.016088 0.581436 0.496714 0.633571 0.227777 0.971433 0.665490 0.074331 0.383556 0.104392 output 1 3 8 6 10 9 5 2 4 7 1 0.930534 0.747036 0.277412 0.938252 0.794592 0.794285 0.961946 0.261223 0.070796 0.384302 0.097035 0.796306 0.452332 0.412415 0.341413 0.566108 0.247172 0.890329 0.429978 0.232970 output 1 3 2 9 6 5 8 7 10 4 1 0.686712 0.087942 0.443054 0.277818 0.494769 0.985289 0.559706 0.861138 0.532884 0.351913 0.712561 0.199273 0.554681 0.657214 0.909986 0.277141 0.931064 0.639287 0.398927 0.406909 output 1 5 2 10 7 4 3 9 8 6 1
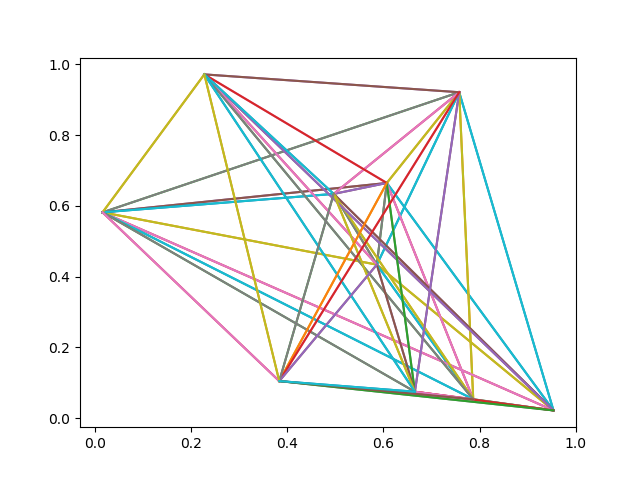
画出第一个例子的全部顶点和边。
{linenos 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 import matplotlib.pyplot as pltpoints='0.607122 0.664447 0.953593 0.021519 0.757626 0.921024 0.586376 0.433565 0.786837 0.052959 0.016088 0.581436 0.496714 0.633571 0.227777 0.971433 0.665490 0.074331 0.383556 0.104392' float_list = list (map (lambda x: float (x), points.split(' ' ))) x,y = [],[] for idx, p in enumerate (float_list): if idx % 2 == 0 : x.append(p) else : y.append(p) for i in range (0 , len (x)): for j in range (0 , len (x)): if i == j: continue plt.plot((x[i],x[j]),(y[i],y[j])) plt.show()
全连接的图
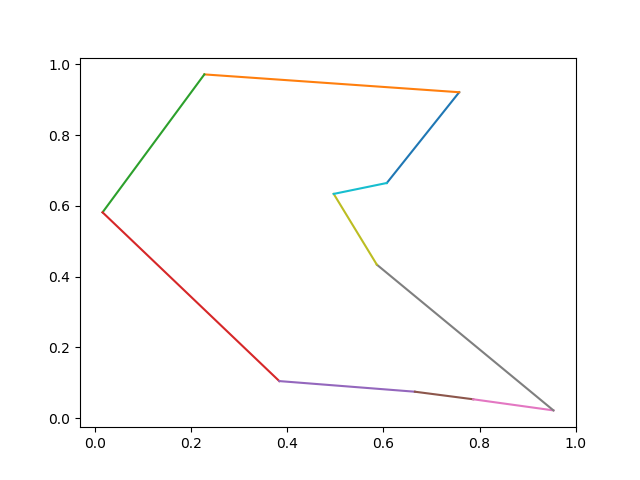
这个例子的最短TSP旅程为 \[
1 \rightarrow 3 \rightarrow 8 \rightarrow 6 \rightarrow 10 \rightarrow 9
\rightarrow 5 \rightarrow 2 \rightarrow 4 \rightarrow 7 \rightarrow 1
\]
{linenos 1 2 3 4 5 6 7 8 tour_str = '1 3 8 6 10 9 5 2 4 7 1' tour = list (map (lambda x: int (x), tour_str.split(' ' ))) for i in range (0 , len (tour)-1 ): p1 = tour[i] - 1 p2 = tour[i + 1 ] - 1 plt.plot((x[p1],x[p2]),(y[p1],y[p2])) plt.show()
最短路径
PTR_NET TSP 的Python代码
初始化Init Graph Edges
在之前的自顶向下的递归版本中,需要做一些改动。首先,是图的初始化,我们依然延续之前的邻接矩阵来表示,由于这次的图是无向图,对于任意两个顶点,需要初始化双向的边。
{linenos 1 2 3 4 5 6 7 8 g: Graph = Graph(N) for v in range (N): for u in range (N): diff_x = coordinates[v][0 ] - coordinates[u][0 ] diff_y = coordinates[v][1 ] - coordinates[u][1 ] dist: float = math.sqrt(diff_x * diff_x + diff_y * diff_y) g.setDist(u, v, dist) g.setDist(v, u, dist)
辅助变量记录父节点
另一大改动是需要在遍历过程中保存的顶点关联信息,以便在最终找到最短路径值时可以回溯对应的完整路径。在下面代码中,使用parent[bitstate][v]
来保存此状态下最小路径对应的顶点u。
{linenos 1 2 3 4 5 6 7 8 9 10 11 ret: float = FLOAT_INF u_min: int = -1 for u in range (self.g.v_num): if (state & (1 << u)) == 0 : s: float = self._recurse(u, state | 1 << u) if s + edges[v][u] < ret: ret = s + edges[v][u] u_min = u dp[state][v] = ret self.parent[state][v] = u_min
当最终最短行程确定后,根据parent的信息可以按图索骥找到完整的行程顶点信息。
{linenos 1 2 3 4 5 6 7 8 9 def _form_tour (self ): self.tour = [0 ] bit = 0 v = 0 for _ in range (self.g.v_num - 1 ): v = self.parent[bit][v] self.tour.append(v) bit = bit | (1 << v) self.tour.append(0 )
需要注意的是,有可能存在多个最短行程,它们的距离值是一致的。这种情况下,代码输出的最短路径可能和数据集output后行程路径不一致,但是的两者的总距离是一致的。下面的代码验证了这一点。
{linenos 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 tsp: TSPSolver = TSPSolver(g) tsp.solve() output_dist: float = 0.0 output_tour = list (map (lambda x: int (x) - 1 , output.split(' ' ))) for v in range (1 , len (output_tour)): pre_v = output_tour[v-1 ] curr_v = output_tour[v] diff_x = coordinates[pre_v][0 ] - coordinates[curr_v][0 ] diff_y = coordinates[pre_v][1 ] - coordinates[curr_v][1 ] dist: float = math.sqrt(diff_x * diff_x + diff_y * diff_y) output_dist += dist passed = abs (tsp.dist - output_dist) < 10e-5 if passed: print (f'passed dist={tsp.tour} ' ) else : print (f'Min Tour Distance = {output_dist} , Computed Tour Distance = {tsp.dist} , Expected Tour = {output_tour} , Result = {tsp.tour} ' )
本文所有代码在 github/MyEncyclopedia tsp/alg_plane 中。



评论
shortnamefor Disqus. Please set it in_config.yml.