本篇是TSP问题从DP算法到深度学习系列第三篇,在这一篇中,我们会开始进入深度学习领域来求近似解法。本文会介绍并实现指针网络(Pointer Networks),一种seq-to-seq模型,它的设计目的就是为了解决TSP问题或者凸包(Convex Hull)问题。本文代码在 https://github.com/MyEncyclopedia/blog/tree/master/tsp/ptr_net_pytorch 中。
第四篇: 搜寻最有可能路径:Viterbi算法和其他
第五篇: 深度强化学习无监督算法的 Pytorch实现
Pointer Networks
随着深度学习 seq-to-seq 模型作为概率近似模型在各领域的成功,TSP问题似乎也可以用同样的思路去解决。然而,传统的seq-to-seq 模型其输出的类别是预先固定的。例如,NLP RNN生成模型每一步会从 \(|V|\) 大的词汇表中产生一个单词。 然而,有很大一类问题,譬如TSP问题、凸包(Convex Hull)问题、Delaunay三角剖分问题,输出的类别不是事先固定的,而是随着输入而变化的。 Pointer Networks 的出现解决了这种限制:输出的类别可以通过指向某个输入,以此克服类别的问题,因此形象地取名为指针网络(Pointer Networks)。先来看看原论文中提到的三个问题。
凸包问题(Convex Hull)
如下图所示,需要在给定的10个点中找到若干个点,使得这些点包住了所有点。问题输入是不确定个数 n 个点的位置信息,输出是 k (k<=n)个点的。 这个经典的算法问题已经被证明找出精确解等价于排序问题(wikipedia 链接),因此时间复杂度为 \(O(n*log(n))\)。
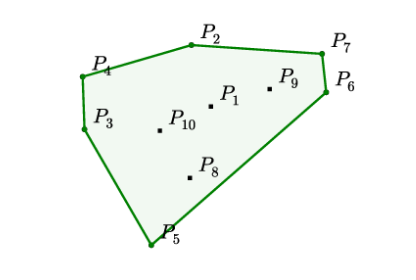
\[ \begin{align*} &\text{Input: } \mathcal{P} &=& \left\{ P_{1}, \ldots, P_{10} \right\} \\ &\text{Output: } C^{\mathcal{P}} &=& \{2,4,3,5,6,7,2\} \end{align*} \]
TSP 问题
TSP 和凸包问题很类似,输入为不确定个数的 n 个点信息,输出为这 n 个点的某序列。在。。。中,我们可以将确定解的时间复杂度从 \(O(n!)\) 降到 \(O(n^2*2^n)\)。

\[ \begin{align*} &\text{Input: } \mathcal{P} &= &\left\{P_{1}, \ldots, P_{6} \right\} \\ &\text{Output: } C^{\mathcal{P}} &=& \{1,3,2,4,5,6,1\} \end{align*} \]
Delaunay三角剖分
Delaunay三角剖分问题是将平面上的散点集划分成三角形,使得在可能形成的三角剖分中,所形成的三角形的最小角最大。这个问题的输出是若干个集合,每个集合代表一个三角形,由输入点的编号表示。
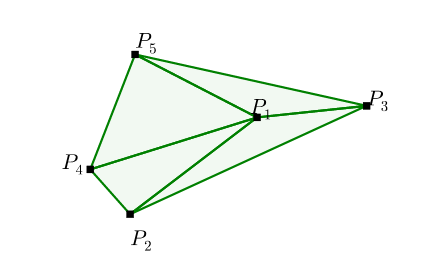
\[ \begin{align*} &\text{Input: } \mathcal{P} &=& \left\{P_{1}, \ldots, P_{5} \right\} \\ &\text{Output: } C^{\mathcal{P}} &=& \{(1,2,4),(1,4,5),(1,3,5),(1,2,3)\} \end{align*} \]
Seq-to-Seq 模型
现在假设n是固定的,传统基本的seq-to-seq模型(参数部分记为 \(\theta\) ),训练数据若记为\((\mathcal{P}, C^{\mathcal{P}})\),,将拟合以下条件概率:
\[ \begin{equation} p\left(\mathcal{C}^{\mathcal{P}} | \mathcal{P} ; \theta\right)=\prod_{i=1}^{m(\mathcal{P})} p\left(C_{i} | C_{1}, \ldots, C_{i-1}, \mathcal{P} ; \theta\right) \end{equation} \] 训练的方向是找到 \(\theta^{*}\) 来最大化上述联合概率,即: \[ \begin{equation} \theta^{*}=\underset{\theta}{\arg \max } \sum_{\mathcal{P}, \mathcal{C}^{\mathcal{P}}} \log p\left(\mathcal{C}^{\mathcal{P}} | \mathcal{P} ; \theta\right) \end{equation} \]
Content Based Input Attention
一种增强基本seq-to-seq模型的方法是加入attention机制。记encoder和decoder隐藏状态分别是 $ (e_{1}, , e_{n}) $ 和 $ (d_{1}, , d_{m()}) $。seq-to-seq第 i 次输出了 \(d_i\),注意力机制额外计算第i步的注意力向量 \(d_i^{\prime}\),并将其和\(d_i\)连接后作为隐藏状态。\(d_i^{\prime}\)的计算方式如下,输入 $ (e_{1}, , e_{n}) $ 和 i 对应的权重向量 $ (a_{1}^{i}, , a_{n}^{i}) $做点乘。
\[ d_{i} = \sum_{j=1}^{n} a_{j}^{i} e_{j} \]
$ (a_{1}^{i}, , a_{n}^{i}) $ 是向量 $ (u_{1}^{i}, , u_{n}^{i}) $ softmax后的值, \(u_{j}^{i}\) 表示 \(d_{i}\) 和 \(e_{j}\)的距离,Pointer Networks论文中的距离为如下的tanh公式。\[ \begin{eqnarray} u_{j}^{i} &=& v^{T} \tanh \left(W_{1} e_{j}+W_{2} d_\right) \quad j \in(1, \ldots, n) \\ a_{j}^{i} &=& \operatorname{softmax}\left(u_{j}^{i}\right) \quad j \in(1, \ldots, n) \end{eqnarray} \]
更多Attention计算方式
在FloydHub Blog - Attention Mechanism 中,作者清楚地解释了两种经典的attention方法,第一种称为Additive Attention,由Dzmitry Bahdanau 提出,也就是Pointer Networks中通过tanh的计算方式,第二种称为 Multiplicative Attention,由Thang Luong*提出。
Luong Attention 有三种方法计算 \(d_{i}\) 和 \(e_{j}\) 的距离(或者可以认为向量间的对齐得分)。\[ \operatorname{score} \left( d_i, e_j \right)= \begin{cases} d_i^{\top} e_j & \text { dot } \\ d_i^{\top} W_a e_j & \text { general } \\ v_a^{\top} \tanh \left( W_a \left[ d_i ; e_j \right] \right) & \text { concat } \end{cases} \]
Pointer Networks
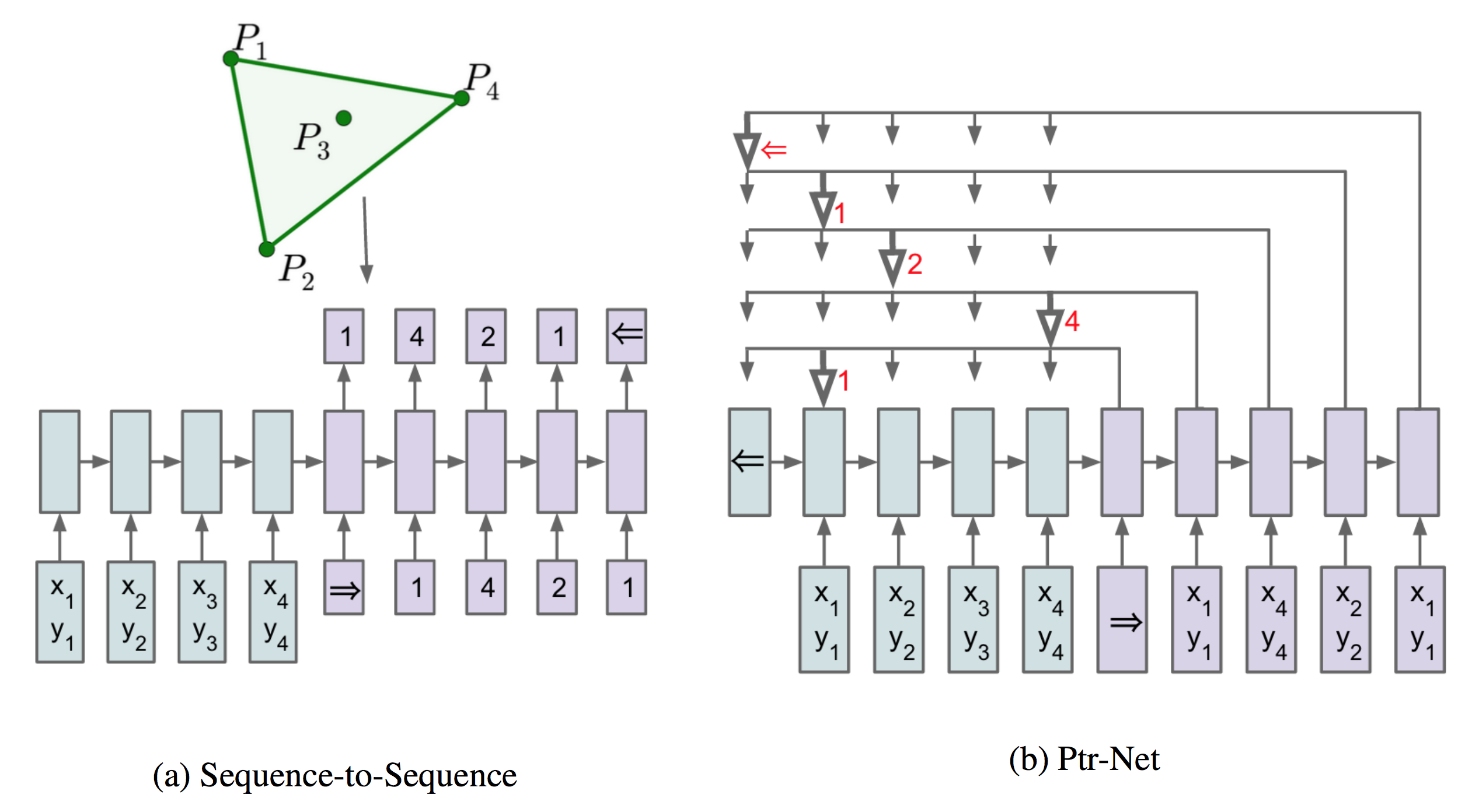
Pointer Networks 基于Additive Attention,其创新之处在于用 \(u^i_j\) 作为第j个输入的评分,即第 i 次输出为1-n个输入中 \(u^i_j\) 得分最高的j作为输出,这样巧妙的解决了n不是预先固定的限制。
\[ \begin{eqnarray*} u_{j}^{i} &=& v^{T} \tanh \left(W_{1} e_{j}+W_{2} d_{i}\right) \quad j \in(1, \ldots, n) \\ p\left(C_{i} | C_{1}, \ldots, C_{i-1}, \mathcal{P}\right) &=& \operatorname{softmax}\left(u^{i}\right) \end{eqnarray*} \]
PyTorch 代码实现
在本系列第二篇 episode 2,中,我们说明过TSP数据集的格式,每一行字段意义如下
1 | x0, y0, x1, y1, ... output 1 v1 v2 v3 ... 1 |
转换成PyTorch Dataset
每一个case会转换成nd.ndarray,共有五个分量,分别是 (input, input_len, output_in, output_out, output_len) 并且分装成pytorch的 Dataset类。
1 | from torch.utils.data import Dataset |

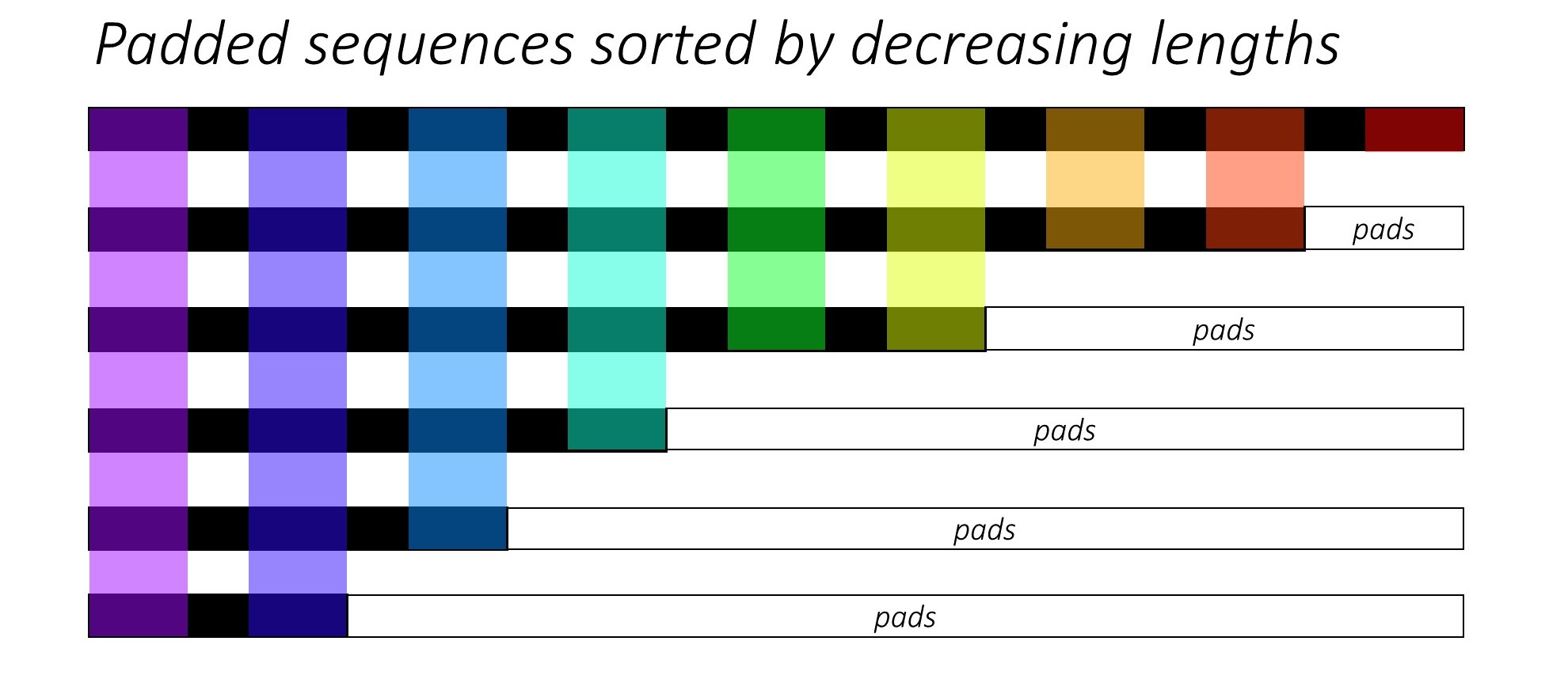
PyTorch pad_packed_sequence 优化技巧
PyTorch 实现 seq-to-seq 模型一般会使用 pack_padded_sequence 以及 pad_packed_sequence 来减少计算量,本质上可以认为根据pad大小分批进行矩阵运算,减少被pad的矩阵元素导致的无效运算,详细的解释可以参考 https://github.com/sgrvinod/a-PyTorch-Tutorial-to-Image-Captioning#decoder-1。
对应代码如下:
1 | class RNNEncoder(nn.Module): |
注意力机制相关代码
1 | class Attention(nn.Module): |

评论
shortnamefor Disqus. Please set it in_config.yml.